_____________
After
graduating Math and Science program at some Leningrad (USSR) High school in 1973. I
had applied only to one University: St. Petersburg
State Technical
University, St. Petersburg, Russia.
But 1st I had idea to go to get engineering phisics major specifically in Biophysics/Bionics.
I visited a few test preparation
sessions (like SAT subject tests) at that university and I was disappointed of contingent/kids there – they looked too nerdy for me as in spite my
very high GPA I was more like punk :
So I
changed my mind and applied to Mechanical Engineering School.

After one semester I have
realized I was wrong and tried to transfer back… but because of some bureaucracy
issues I almost was terminated.
So I stuck in the Mechanical engineering
for the next 2.5 years and only when “Industrial Robotics” discipline was
established in 1976 in the same faculty, then I was able to move there and finally I got
my master degree in Robotics.
<-That is me on some lecture
having good time:
I realy enjoyed student livfe especially during summer semester. One of them I spent in
the south of Russia in some archaeological expedition:
TRYING TO FIND SOMETHING LIKE:
But most exciting findings was:
... and most important findings was...my future wife!
______
After graduation I worked in
University Data Center as Mainframe System programmer with computers like below:
(I worked with Soviet clones of IBM/360 systems called EC)
Then I entered to Ph.D. program
and got my PhD in Robotics in 1986 in the same university..
Here is the subject of my dissertation:
I have published in
my Russian blog the
abstract of my PhD dissertations (1986 )
Research of Industrial
Robot Grasping Processes
The main idea of that work was to find the way
to calculate a some set of initial grasping
(or assembling) object coordinates that would warrant
successful grasping (or assembling) process (operation). I called
that "Area of Normal Functioning - ANF" (Область Нормального
Функционирования -ОНФ). If grasping or assembling process
starts with parameters (or coordinates) that are not in that
area, the process will be abnormal and failed. That area defined coordinates where the passive (natural) adaptation would work.
Here is couple pictures from my dissertation:
One of the object for the research:


<-- Math. 6-D model
Differential geometry e
quations:


<-- Vector e
quations...
One of the results (
ANF) =>

_______
Then
I become a professor and taught the following courses:
Me on the "Automate" faculty:

I have also work for Brokerage Company trying (unsuccessfully ) to build
some forecasting model about the new Russian stock market:
Here is citation from, my 2008 CMG paper about
that:
________
In 1999 I moved to USA and started from the scratch absolutely
new career – IT Capacity Management. I have published more than 10 paper about that.
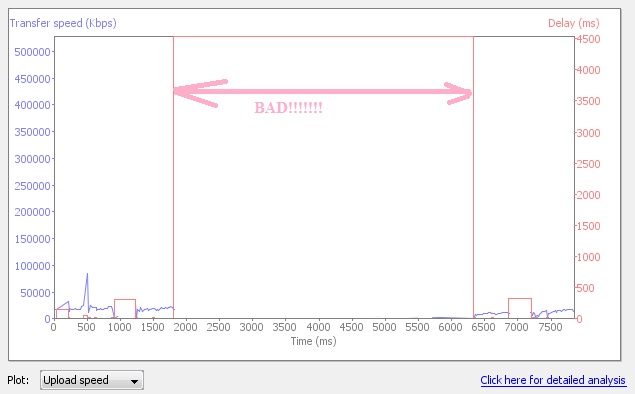
I made a lot of presentation about my favorite topic, which is the statistical analysis of computer behavior. Below is one of the last presentation (workshop) I made:
And I even got the prestigious www.CMG.org best paper award in 2002:
By the way, rereading my old work (dissertation) I suddenly figured out that
my resent idea of Exception Value (anomaly measure, which is area between statistical limits and
just happened actual variables values) is very similar with what my very
old idea of calculating limits for successful assembling or robot
grasping processes!
Below is math. model of that EV which close to ANF model described in my designation:
_______
I have worked for a few Banks IT departments starting with Capital One and then was outsorced to IBM, where now working as Sr. IT Architect doing consulting work.
I had some business with Coca-cola Company and visited thiew museum in Atlata, where I sow robotic shop to produce bottles with Coca-Cola:
I MISS ROBOTS!!!!
So I enjoyed visiting kids' robotic club:
and robotic's competitions:

THANKS!!!!